CONFIRM researcher Eber Lawrence Souza Gouveia recently presented a paper at the ICINCO 20th International Conference on Informatics in Control, Automation, and Robotics which took place in Lisbon between the 14th and 16th of July. The conference brought together researchers, engineers, and practitioners interested in the application of Informatics in Control, Automation, and Robotics.
Paper overview: Smart Autonomous Part Displacement System Based on Point Cloud Segmentation
Robotic arms are widely used in manufacturing lines to automate the manipulation of products, providing many advantages, such as increasing production and minimizing labour costs. However, most robotic arms operate in a controlled environment, executing predefined movements. Such a feature prevents the robot arm from working in an environment where multiple product types are in different placements.
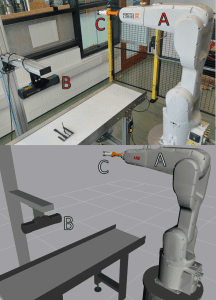
This concept paper describes the development of a smart robotic system capable of performing an autonomous pick-and-place task of injected moulded parts from the first conveyor belt to the next, based on its spatial data obtained from a 3D scanner. After obtaining the digital point cloud from the moulded part, the PointNet deep learning model is used to segment and then extract the spatial position of its sprue, which is one of the common structures of any moulded part. Finally, the robotic arm combined with its end-effector can pick up these parts regardless of their shape, orientation, and size. The system proposed is composed of three components, i.e., the IRB 1200 robotic arm from ABB, the PhoXi 3D Scanner from Photoneo, and the two-finger gripper PB-0013 from Gimatic. Moreover, all system components were interconnected using Robot Operating System as middleware.
Eber’s paper was co-authored by Eddie Armstrong from J&J, CONFIRM FI’s Declan Devine and Sean Lyons and CONFIRM researchers, Rupal Srivastava and Maulshree Singh all from MTU Midlands.